|
Hwiyeon Yoo I am an Research Engineer at NAVER LABS, based in Sungnam, South Korea. My current research focuses on developing end-to-end outdoor mobile robot navigation and world models for sidewalk environments. Prior to joining NAVER LABS, I was a Machine Learning Researcher at Boeing AI (2024–2025), where I developed vision-based AI solutions for aircraft manufacturing automation, including OCR-based key information extraction and anomaly detection for visual inspection. I received my Ph.D. in Electrical and Computer Engineering from Seoul National University (SNU) in 2024, under the supervision of Prof. Songhwai Oh . My doctoral thesis focused on visual context-based topological representations for embodied agent navigation. I also hold a B.S. in Electrical and Computer Engineering from SNU in 2017. My research interests lie at the intersection of Robot Navigation, World Models, Semantic Planning, and Vision-Language-Action (VLA). I am particularly interested in bridging the gap between high-level reasoning and robot control through semantic representations and reinforcement learning. Email / CV / Google Scholar / Github / Linkedin |

|
Research
|
|
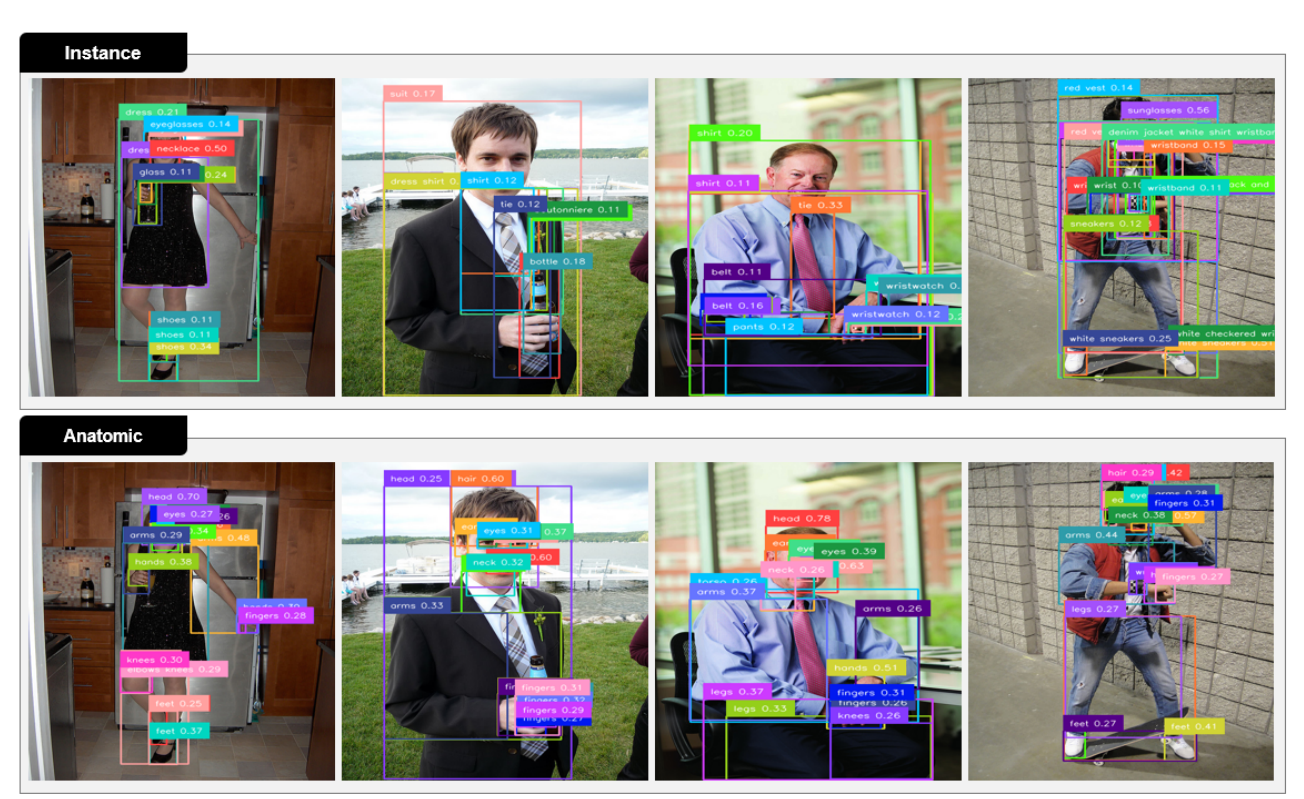
Fine-Grained Open-Vocabulary Object Recognition via User-Guided Segmentation
Jinwoo Ahn, Hyeokjoon Kwon, and Hwiyeon Yoo*. arXiv preprint, 2024. Keywords: Open-vocabulary, Object detection, VLM, Fine-grained detection, User preference arXiv / paper |
|
|
Commonsense-Aware Object Value Graph for Object Goal Navigation
Hwiyeon Yoo, Yunho Choi, Jeongho Park, and Songhwai Oh. IEEE Robotics and Automation Letters (RA-L), 2024 40th Anniversary of the IEEE Conference on Robotics and Automation (ICRA@40), 2024 Keywords: Visual navigation, Embodied agent, Object goal navigation, Semantic scene understanding paper / code / video |
|
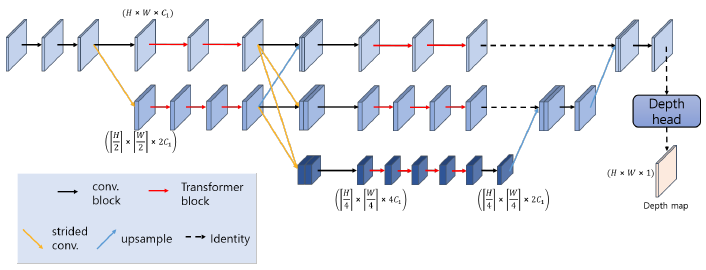
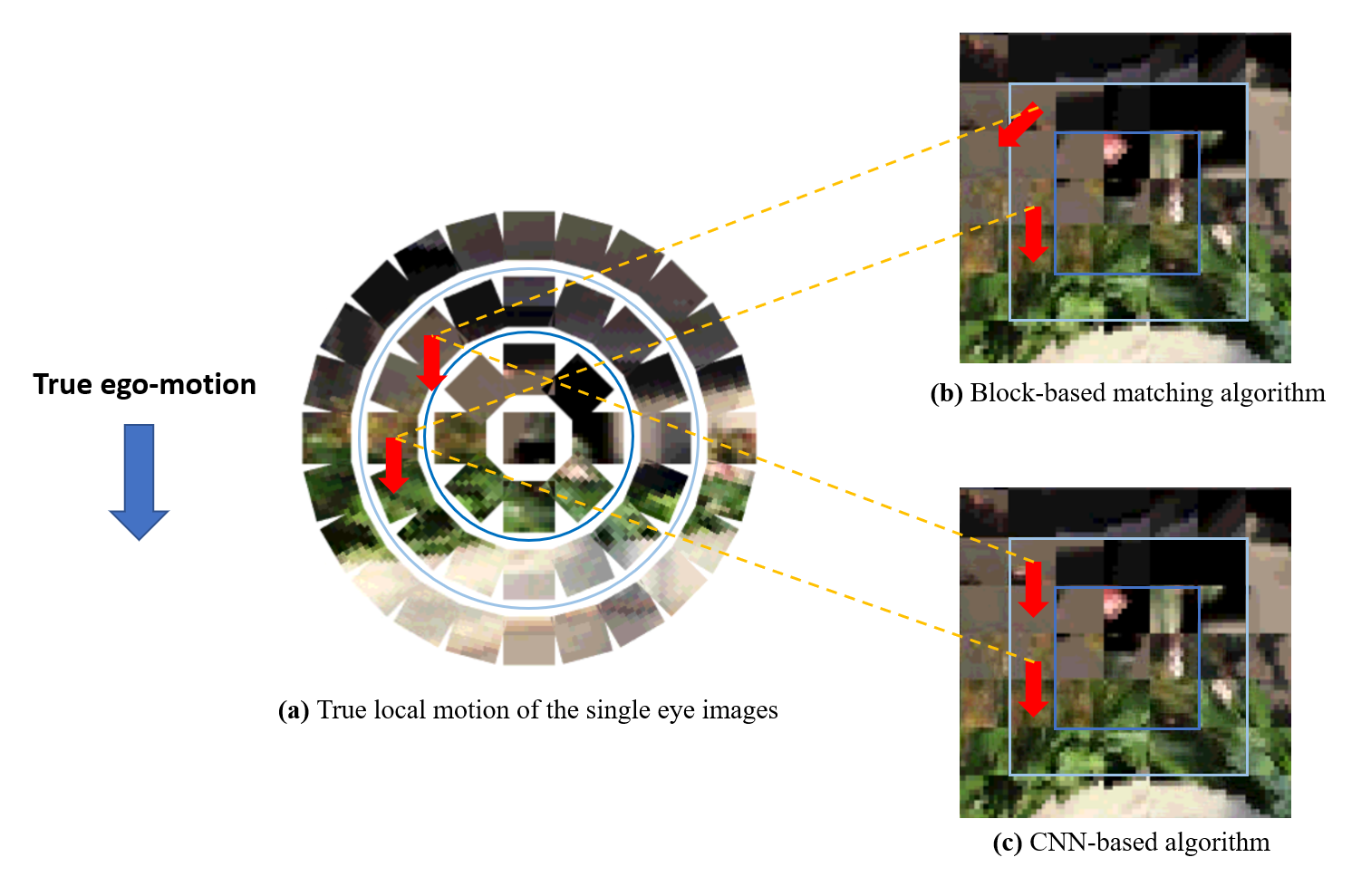
Local Selective Vision Transformer for Depth Estimation Using a Compound Eye Camera
Wooseok Oh, Hwiyeon Yoo, Timothy Ha, and Songhwai Oh. Pattern Recognition Letters, 2023. Keywords: Depth estimation, Vision transformer, Biomimetics paper |
|
|
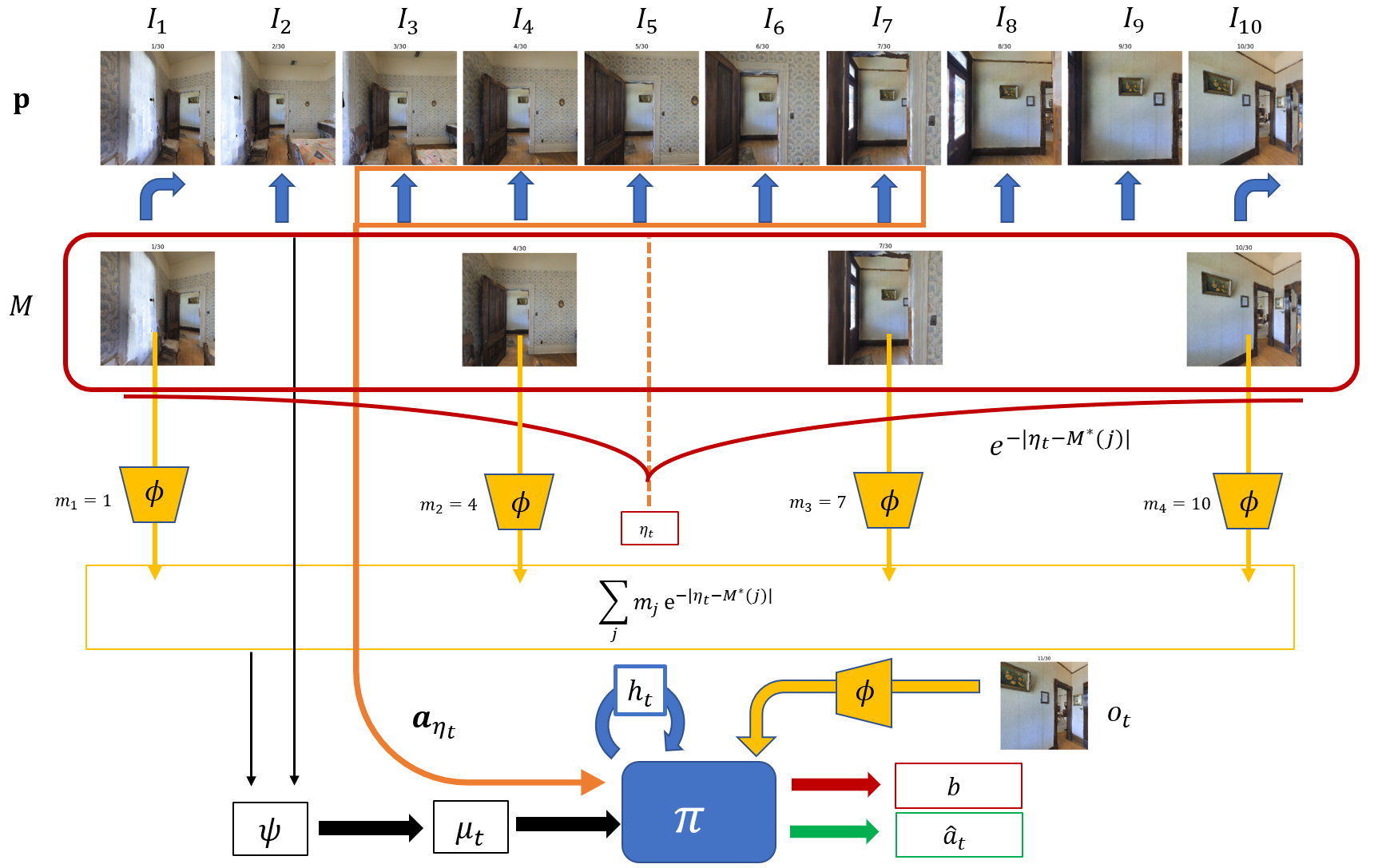
Topological Semantic Graph Memory for Image-Goal Navigation
Nuri Kim, Obin Kwon, Hwiyeon Yoo, Yunho Choi, Jeongho Park, and Songhwai Oh. Conference on Robot Learning (CoRL), 2022. Oral presentation Keywords: Visual navigation, Embodied agent, Image goal navigation, Semantic scene understanding project page / paper / code / video |
|
|
Visual Graph Memory with Unsupervised Representation for Visual Navigation
Obin Kwon, Nuri Kim*, Yunho Choi*, Hwiyeon Yoo*, Jeongho Park*, Songhwai Oh. (* equal contribution) International Conference on Computer Vision (ICCV), 2021. Keywords: Visual navigation, Embodied agent, Image goal navigation, Semantic scene understanding project page / paper / code / video |
|
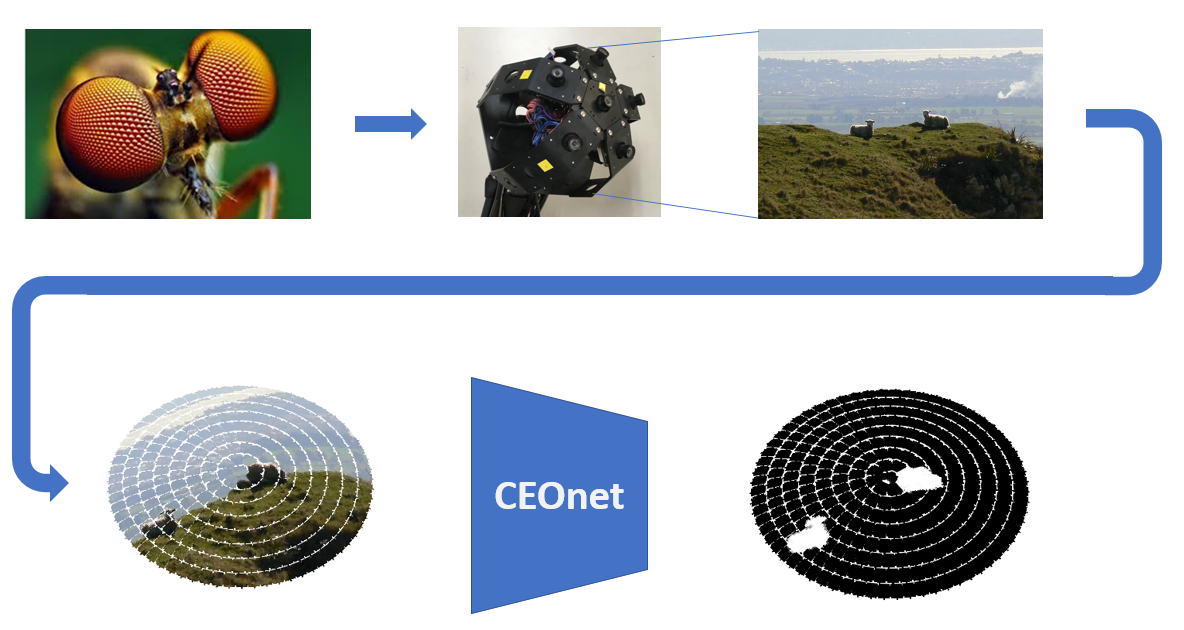
Actualization of Deep Ego-motion Classification on Miniaturized Octagonal Compound Eye Camera
Hwiyeon Yoo, Jungho Yi, Jong Mo Seo, and Songhwai Oh. International Conference on Control, Automation and Systems (ICCAS), 2021. Best Poster Paper Award Winner Keywords: Ego-motion classification, Biomimetics, Biomimetic camera paper |
|
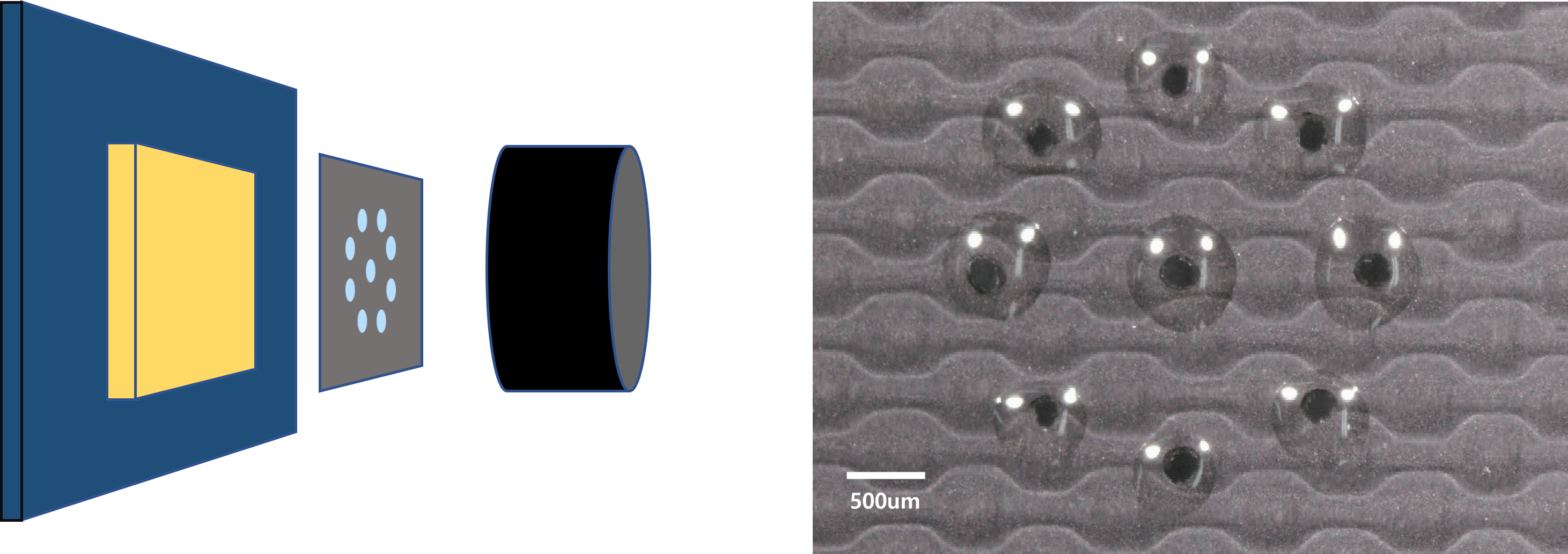
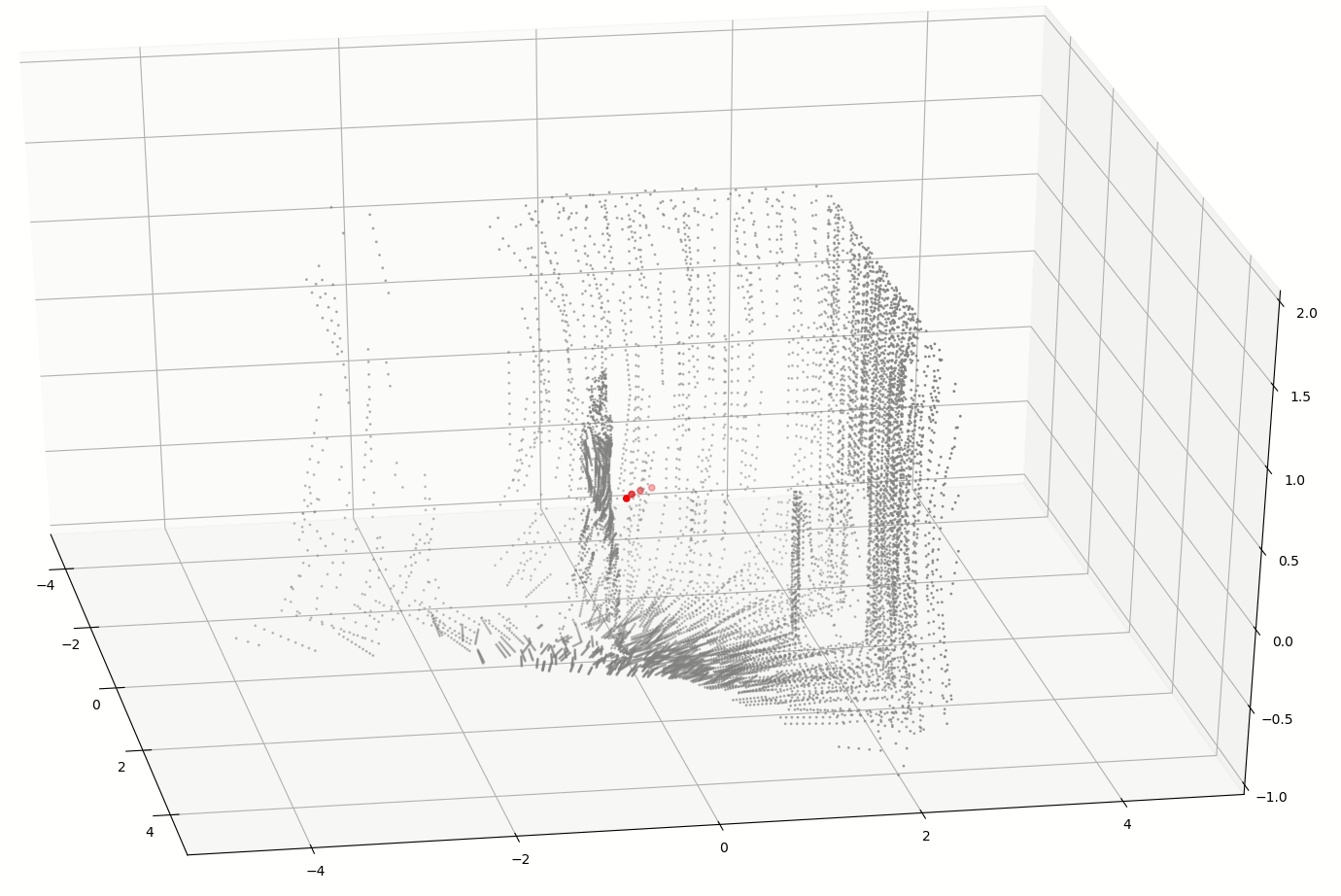
Vision-Based 3D Reconstruction Using a Compound Eye Camera
Wooseok Oh, Hwiyeon Yoo, Timothy Ha, and Songhwai Oh. International Conference on Control, Automation and Systems (ICCAS), 2021. Keywords: Depth estimation, 3D reconstruction, Biomimetics paper |

|
Localizability-based Topological Local Object Occupancy Map for Homing Navigation
Hwiyeon Yoo, and Songhwai Oh. International Conference on Ubiquitous Robots (UR), 2021. Keywords: Visual navigation, Embodied agent, Homing, Topological mapping paper |
|
Path-Following Navigation Network Using Sparse Visual Memory
Hwiyeon Yoo, Nuri Kim, Jeongho Park, and Songhwai Oh. International Conference on Control, Automation and Systems (ICCAS), 2020. Keywords: Visual navigation, Embodied agent, Path following, Visual memory paper |
|
Deep Ego-Motion Classifiers for Compound Eye Cameras
Hwiyeon Yoo, Geonho Cha, and Songhwai Oh. Sensors, vol. 19, no. 23, Dec.2019. Keywords: Ego-motion classification, Biomimetics, Biomimetic camera paper |

|
Unsupervised Holistic Image Generation from Key Local Patches
Donghoon Lee, Sangdoo Yun, Sungjoon Choi, Hwiyeon Yoo, Ming-Hsuan Yang, and Songhwai Oh. European Conference on Computer Vision (ECCV), 2018. Keywords: Unsupervised image generation, GAN, Image completion paper / code |
|
|
Text2Action: Generative Adversarial Synthesis from Language to Action
Hyemin Ahn, Timothy Ha*, Yunho Choi, Hwiyeon Yoo*, and Songhwai Oh. (* equal contribution) IEEE International Conference on Robotics and Automation (ICRA), 2018. Keywords: Action generation, GAN paper / code / video |
|
Estimating Objectness Using a Compound Eye Camera
Hwiyeon Yoo, Donghoon Lee, Geonho Cha, and Songhwai Oh. International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI), 2017. Keywords: Objectness, Biomimetics, Biomimetic camera paper |
|
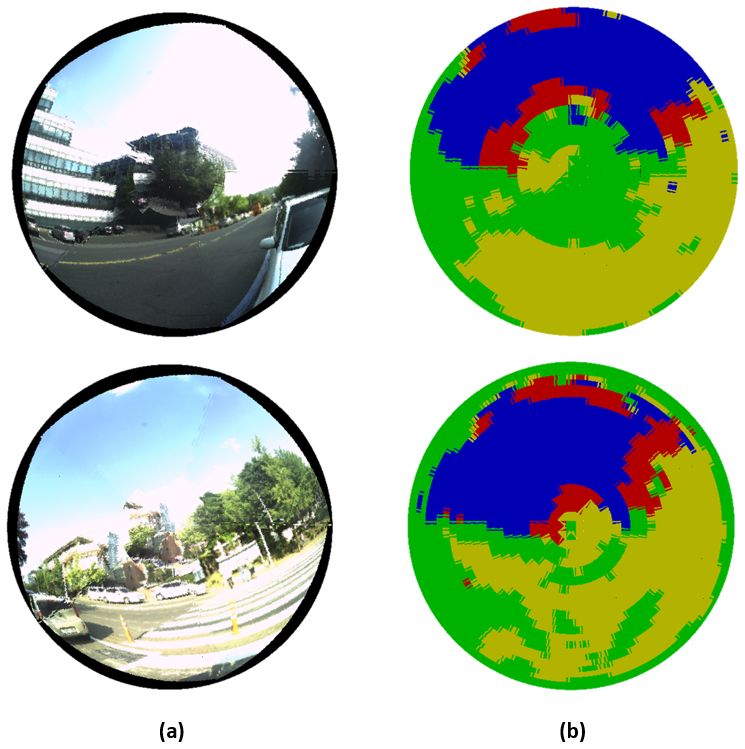
Light-Weight Semantic Segmentation for Compound Images
Geonho Cha, Hwiyeon Yoo, Donghoon Lee, and Songhwai Oh. International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI), 2017. Keywords: Semantic segmentation, Biomimetics, Biomimetic camera paper |
Projects
|
|
General-Purpose Deep Reinforcement Learning Using Metaverse for Real World Applications
National Research Foundation of Korea (NRF) funded by the Ministry of Science and ICT (MSIT), 2023-
|
|
AI Technology for Guidance of a Mobile Robot to its Goal with Uncertain Maps in Indoor/Outdoor Environments
Ministry of Science and ICT (MSIT), 2019-2023
|
|
BioMimetic Robot Research Center - Biomimetic Recognition Technology
Defense Acquisition Program Administration and Agency for Defense Development (ADD), 2016-2021
|
|
Realistic 4D Reconstruction of Dynamic Objects
Ministry of Science and ICT (MSIT), 2017-2019
|
|
This webpage template is from Jon Barron's. |